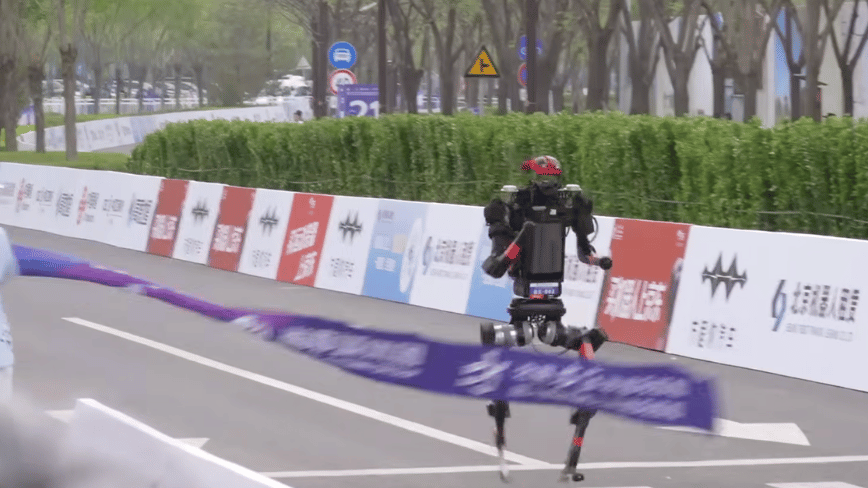
The Beijing E-Town Half-Marathon recently served as a testing ground for a new kind of endurance athlete. A humanoid robot named Lightning, developed by Shenzhen Honor Smart Technology Development Co., completed the 21-kilometer course in 50 minutes and 26 seconds — a time that surpasses the current human world record for the half-marathon by nearly seven minutes. The robot navigated the course autonomously, without remote control, relying on an on-board suite of multi-sensor fusion and real-time decision-making algorithms to maintain balance and adjust its stride across the full distance.
The feat registers as more than a novelty. It marks a concrete threshold in bipedal robotics: sustained, high-speed locomotion over a meaningful distance, executed without human intervention. For an industry that has spent years producing machines that stumble on flat surfaces, the gap between Lightning's performance and the state of the art even three years ago is difficult to overstate.
From controlled demos to open road
The history of humanoid locomotion research is littered with cautious, stage-managed demonstrations. Honda's ASIMO, introduced in 2000, could walk and climb stairs but moved at a pace slower than most pedestrians and required carefully prepared environments. Boston Dynamics' Atlas, arguably the most publicly visible bipedal robot of the 2010s and early 2020s, demonstrated acrobatic feats — backflips, parkour sequences — but in short, controlled bursts designed to showcase specific capabilities rather than endurance. The common thread was that bipedal robots could perform impressive isolated tasks but struggled with the compounding challenge of doing anything for a long time, over uncontrolled terrain, without falling.
Lightning's half-marathon run represents a departure from that pattern. A 21-kilometer road course introduces variables that a laboratory floor does not: uneven pavement, gradual elevation changes, ambient wind, and the cumulative thermal and mechanical stress of sustained operation. That the robot completed the distance autonomously — processing environmental data in real time to modulate gait and balance — suggests that the underlying control algorithms have reached a level of robustness that earlier systems lacked. The engineering challenge is no longer simply making a bipedal machine walk; it is making one run, reliably, for the better part of an hour.
The endurance question and its industrial implications
The significance of the record extends beyond athletics as metaphor. Endurance — the capacity to perform physical tasks continuously without degradation — is the bottleneck that separates humanoid robots as research curiosities from humanoid robots as practical tools. Warehouse logistics, disaster response, infrastructure inspection: each of these domains demands machines that can operate bipedally over extended periods in environments built for human bodies. A robot that can sustain a running pace of roughly 25 kilometers per hour for 50 minutes is, at minimum, demonstrating the energy management, thermal regulation, and mechanical durability that those applications require.
The competitive landscape matters here as well. China's robotics sector has accelerated its investment in humanoid platforms, with multiple firms racing to produce commercially viable bipedal systems. Lightning's public performance at a sanctioned athletic event functions simultaneously as a technical milestone and a market signal — a demonstration aimed at potential industrial and government customers as much as at the robotics research community.
Still, the distance between a half-marathon on a paved road and reliable deployment in unstructured environments remains substantial. Running in a straight line at high speed tests one set of capabilities; navigating a cluttered warehouse or a collapsed building tests another. The algorithms that kept Lightning upright over 21 kilometers may not generalize easily to tasks requiring fine manipulation, obstacle negotiation, or interaction with humans in close quarters.
What Lightning's run does establish is that the raw locomotion problem — the physics of keeping a bipedal machine moving fast and upright over distance — is increasingly solved. The harder questions now are about versatility, cost, and trust. Whether the same engineering trajectory that produced a record-breaking runner can produce a useful worker is the tension that will define the next phase of the humanoid robotics industry.
With reporting from The Next Web.
Source · The Next Web